|
Progetto di sistemi di controllo in ambiente Matlab/Simulink per la piattaforma Lego Mindstorms
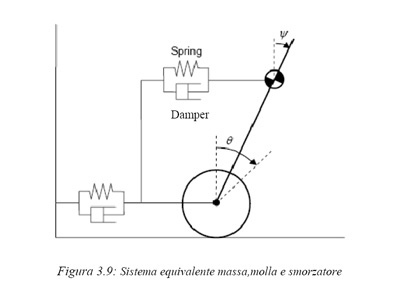
Questa tesi tratta di esperimenti di controllo effettuati mediante l'utilizzo del sensore giroscopio dell'Hi-Technic e dei prodotti della linea LEGO Mindstorms. Si è costruito e si sono studiate le caratteristiche di un Legway, che da un punto di vista fisico può essere modellato come un pendolo inverso con due ruote.L' obbiettivo prefissato è quello di progettare un controllore, che riesca a far stare in equilibrio il Legway, ricorrendo al linguaggio di programmazione MATLAB/Simulink e ai toolbox Real-Time Workshop, Real-TimeWorkshop Embedded Coder, Embedded Coder Robot e Virtual Reality Toolbox.
La complessità di questo software è compensata dalle enormi potenzialità che offre per lo sviluppo di un modello complesso e per la sua analisi. Infatti dopo aver modellato il Legway si sono potuti modificare, con estrema velocità e semplicità, i sensori utilizzati per il controllo del sistema fisico scelto. Sono stati realizzati tre Legway diversi: uno con il giroscopio e con il sensore ad ultrasuoni, un altro con il sensore ad ultrasuoni e con quello di luce e un terzo con due sensori di luce ed uno ad ultrasuoni. Grazie all'utilizzo del Bluetooth sono stati raccolti i dati ottenuti durante le simulazioni e questo ci ha consentito di modificare, in modo empirico, alcuni parametri all'interno degli schemi a blocchi costruiti.
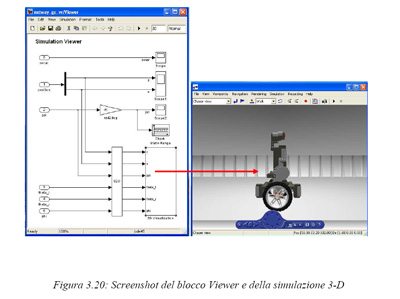
Utilizzando il toolbox Virtual Reality si è ottenuta una visualizzazione 3-D del modello creato capace di muoversi in un mondo di realtà virtuale, senza ricorrere all'implementazione fisica. L'esperienza fatta su questo modello piuttosto semplice è stata molto utile perché ci ha permesso di familiarizzare con il Model-Based Design e con i toolbox di MathWorks che insieme costituiscono una tecnica affermata per sistemi di controllo embedded anche molto complessi. Questa tecnica viene anche utilizzata per il controllo di satelliti, di velivoli e di altre applicazioni aereospaziali, per processi di controllo e per macchinari industriali. La tesi è strutturata come segue:
E' possibile scaricare la tesi in formato PDF - [ 5,40 Mb] Riferimenti: http://www.teamhassenplug.org/robots/legway http://www.philohome.com/nxtway/nxtway.htm http://www.philohome.com/nxtjoystick/joystick.htm  |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Scienza Ludica è un progetto ISC - Istituto Sistemi Complessi del CNR |
