|
Pendolo di Furuta
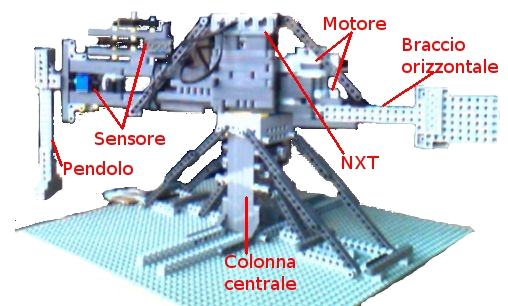
Il Perche' Con questo esperimento si vuole realizzare un pendolo di Furuta, che e' un particolare tipo di pendolo inverso, presente in molti laboratori di automatica. La scelta di questo progetto si puo' attribuire alle caratteristiche proprie del pendolo, che unisce un comportanento intuitivo alla necessita' di un controllo non banale. Risulta chiara allora la sua scelta per testare le potenzialita' dell' NXT. Struttura La struttura cerca di ricreare quella dei reali pendoli presenti nei laboratori di controlli automatici:

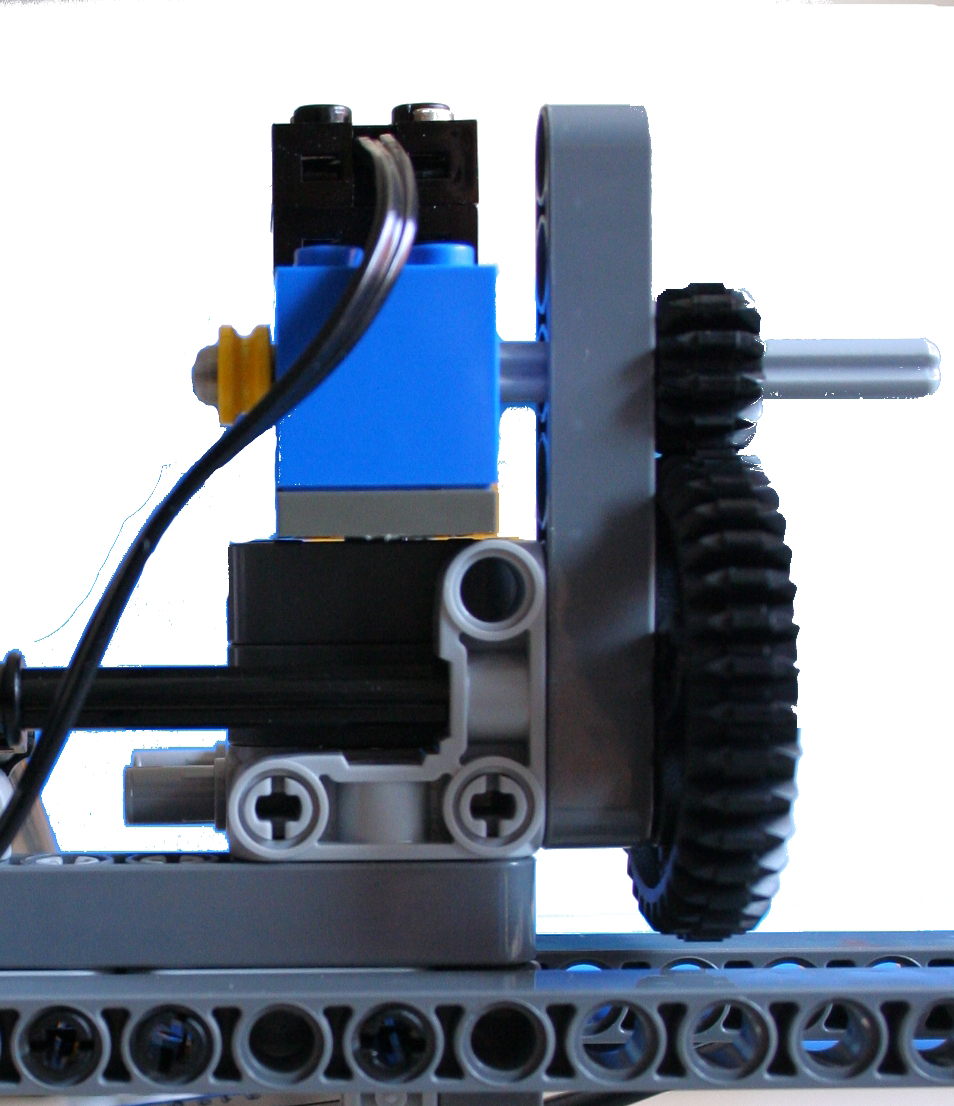
Sensori Sono stati utilizzati due tipi di sensori:

L'esperimento presenta notoveli difficolta', dovutenon tanto all'algoritmo di controllo, ma bensi' alla struttura meccanica stessa. Tutto il sistema non risulta stabile: sia i componenti LEGO che le varie giunzioni, risultano flessibili ed elastici. L'intera struttura risente sensibilmente di tale fenomeno, oscillando vistosamente dureante il funzionamento. Si puo' pensare allora di creare una nuova configurazione del pendolo, che migliori le varie caratteristiche meccaniche.
.png "Pendolo Nuovo") Questa nuova configurazione elimina la flessione del braccio, irrigidendo la struttura. Il risultato complessivo e' un comportamento decisamente migliore durante il funzionamento. Conclusioni Nonostatnte la nuova strutta e le varie soluzioni costruttive adottate, non e' stato possibile mantenere in equilibrio il pendolo. Molti dei fenomeni non sono modellati. Un esempio e' visibile in figura, dove si nota la risposta del motore, con attaccato il pendolo. L'andamento oscillante e' causato dalla presenza di giunzioni elastiche tra le varie parti del pendolo

Tuttavia questo esperimanto ha mostrato le potenzialita' del NXT ed ha gettato le basi per il nuovo progetto il Legway, il cui funzionamento e' paragonabile a quello del pendolo. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Scienza Ludica è un progetto ISC - Istituto Sistemi Complessi del CNR |